
Selective asparagus harvesting with autonomous robot
AvL Motion is breaking new ground – with a machine for the selective harvesting of white asparagus, 'garnished' with high precision sensors as well as RFID and fieldbus technology from Turck
The Dutch startup company AvL Motion put on the market a machine for the fully autonomous selective harvesting of white asparagus. In its search for an ultrasonic sensor for height control, the company came across the IO-Link compatible RU40U from Turck. Through the subsequent collaboration more sensor technology was integrated in the vehicle, including miniature inductive proximity switches, precise encoders as well as LE550 laser sensors from Banner Engineering and the robust Li500-Q25 linear position sensor. AvL also uses the TN-Q14 RFID read/write head for the identification of harvesting modules, while the TBEN-S2-4IOL compact I/O module transfers IO-Link signals to the PLC.
-turck-image.jpg)
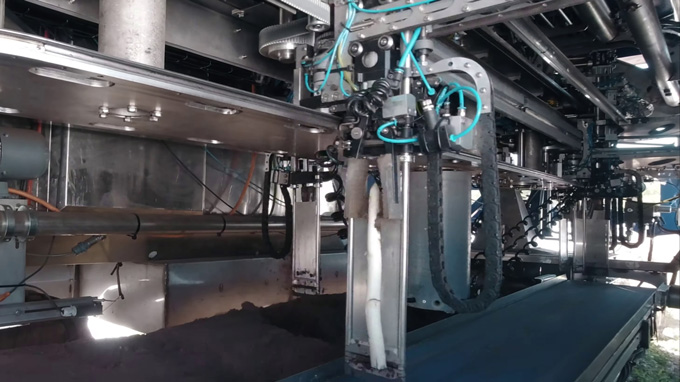
The AvL Compact S1560 pulls asparagus spears automatically from the soil

Six to twelve harvesting modules are located on the machine

AvL founder Arno van Lankveld uses Turck's IO-Link ultrasonic sensor RU40U

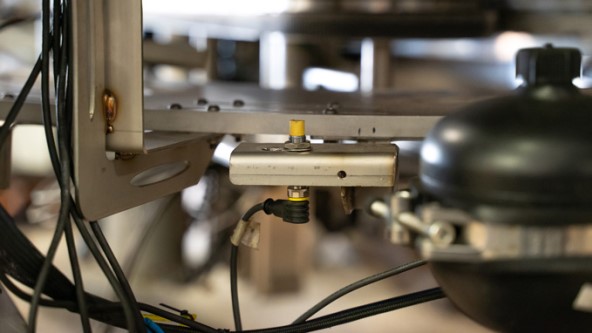
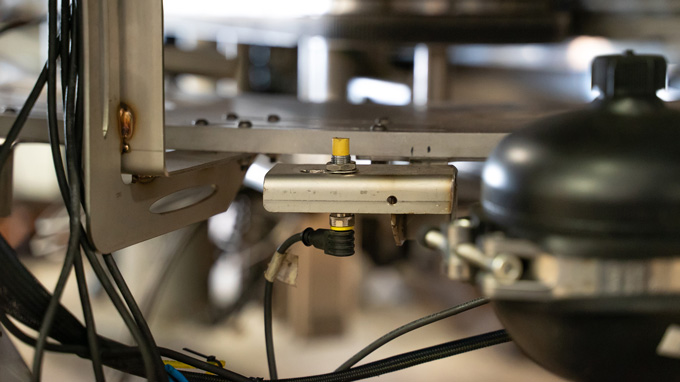
Thanks to its robust design, the Li500-Q25 sensor can also be fitted outside above the front axle

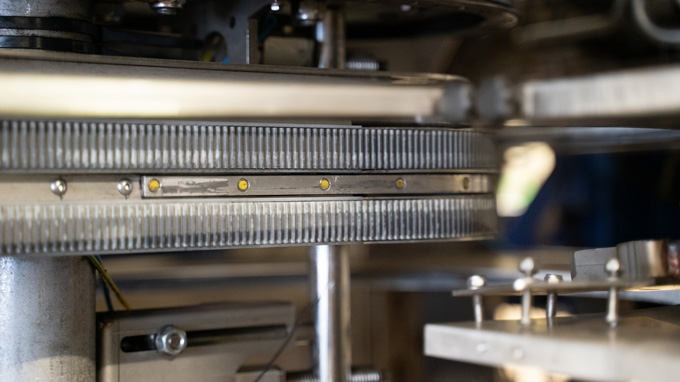
BI3-M08K miniature sensors in the buffer area detect the number of harvesting cassettes
When a cassette passes the NI10U-M12, the PLC starts the timer for a harvesting operation

Turck encoders report at which position of the buffer a harvesting module is currently available

On the driver's platform, a worker packs the asparagus into boxes and has control of the harvester

The TBEN-S2-4IOL multiprotocol device is used as an interface between sensors and PLC
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Height control via ultrasonic sensor with IO-Link
AvL Motion uses two of the ultrasonic sensors RU40U with IO-Link to measure the distance between the asparagus bed and the pneumatically controlled internal frame of the machine. In spite of the partly dusty or rain-slicked subsoil, the sensors enable a stable measurement of the height, which users can set on an HMI. “Turck impressed us with the outstanding quality and fast delivery of their product. We therefore stayed with the manufacturer for other components,” says AvL CEO Arno van Lankveld.
Optical process replaces trained eye
The harvesting process of the AvL Compact S1560 is very dynamic. Once the machine is positioned and set in motion, the surface of the soil is scanned. The precise location of an asparagus tip is detected by the main controller through the use of laser sensors, together with an additional optical process. A variable number of harvesting modules move in the process round a circular track inside the robot. At present, this consists of twelve of the around 25 centimeter high cassettes. They are adjusted to the speed of the robot and control the entire process of inserting, cutting and gripping.
Fine tuning between target and harvesting module
The controller not only needs the coordinates of the selected asparagus spears to fine tune the harvesting process, but also a continuous flow of information on the position and movement of the modules. This starts with the query of how many cassettes are currently located in the buffer, i.e. how many are in park position, and those currently detecting an asparagus shoot in the circuit. For this AvL uses the tiny BI3-M08K inductive sensors. The exact identification of the harvesting modules is implemented with RFID – using the TN-Q14 HF read/write head, which reads the individual code of each cassette. Added to this is the position detection provided by a rotary encoder.
Inductive sensor triggers a timer
Once a harvesting machine starts its circuit, this passes a type NI10U-M12 uprox proximity switch, which sets the running of the timer for the harvesting process in the PLC. As the asparagus spears do not grow in tidy rows, the harvesting modules can also move left or right in addition to their movement round the circular track. This is driven with compressed air and is therefore always delayed by a few tenths of a second. In order to nevertheless ensure the correct alignment of the cassettes, the PLC obtains information about the distance between the initial and target position of the modules, measured with LE550 laser sensors from Turck's optoelectronics partner Banner Engineering.
Turning maneuver by joystick
Operators use an external control module to control the speed and the hydrostatic steering of the harvesting machine. Two Turck encoders measure the wheel revolutions; AvL uses an inductive linear position sensor to measure the wheel position. For this the positioning element of the LI500-Q25 sensor is linked with the piston of the steering cylinder. In this way, the main controller calculates the angle of both wheels using only one value – and operators can turn the machine easily with a joystick. Unlike the models offered by the competition, farmers do not have to attach the AvL Compact S1560 to a tractor.
Further Information
- c04b_DOWNLOAD-Item 37617 [PDF, MB]
- Video (YouTube): The Fully Autonomous White Asparagus Harvesting Robot
- At a Glance: Encoder Portfolio for Numerous Industrial Applications
- Link to the Product: Ultrasonic Sensor RU40U-M18E-LIU2PN8X2T-H1151
- Link to the Product: Inductive Sensor BI3-M08K-AP6X-V1131
- Link to the Product: Inductive Sensor NI10U-M12-AP6X-H1141
- Link to the Product: Inductive Linear Position Sensor LI500P0-Q25LM0-LIU5X3-H1151
- Link to the Product: Photoelectric Sensor LE550IQ
- Link to the Product: Photoelectric Sensor with IO-Link LE550KQ
- Link to the Product: HF-RFID Read/write Head TN-Q14-0.15-RS4.47T
- Link to the Product: Compact Multiprotocol I/O Module TBEN-S2-4IOL
- Download Whole Article – more12050e [PDF, 1,31 MB]
- Automotive
- Modular Flexibility and Safety in Filter Production
- Smart Cable Prevents Machine Downtimes
- Inductive Couplers Ensure Precise Material Feed
- Assembly Management with a Direct MES Connection
- Car Body Identification in Automobile Production
- Reliable Skid Detection in Automotive Production
- Error-free JIS Order Picking for Bumpers
- Laser Sensor Detects Shiny Sheet Metal Cylinders in Battery Production
- RFID Bus Mode Ensures Quality of Lithium-Ion Batteries
- Level Measurement in Dip Coating Line
- Level Control in Central Lubrication System
- Quality Assurance on the Gluing Robot
- Tilt angle sensor accelerates platform alignment
- Motor Control with Condition Monitoring
- IP67 Hybrid Module Processes Safety Signals
- Decentralized monitoring of cooling stations
- Robot welding cells networked with Ethernet
- Monitoring the cooling circuit on welding clamps
- Flow monitoring in drum washers
- Sheet Metal Thickness Measurement
- Condition Monitoring of Motors as a Retrofit
- Cloud-based Level Monitoring
- Press Shop – Tool Identification
- Body Shop – Welding Nut Detection
- Paint Shop – Skid Identification
- Final Assembly – Robot Assembly
- Powertrain – Contactless Verification
- Area Guarding for Robotic Cells
- Item-level Detection with UHF RFID
- Supply of cooling lubricant in machine tools
- Press Shop: Controlling hydraulic pressure
- Measuring process pressure on scissor lifts
- Inspection of Tips on a Welder
- Manual Feeding in Weld Cell
- Detecting Black Parts on Black Door Panel
- Moonroof Clear Glass Detection
- Long-Range Inspection in Automotive Assembly
- Rubber Washer Detection on Engine Block
- Engine Block Part-In-Place Detection
- Electric Vehicle Detection in Charging Station
- Vehicle Detection in a Self-Serve Car Wash
- Success Stories
- RFID Solution for Data Acquisition in Stator Production
- Modular Plant for Flexible and Efficient Production
- Laser Sensor Detects Black Bumpers in Assembly Cell
- Decentralized Safety Technology for Modular Production
- Modular Conveyor System
- RFID and I/O Modules for Safe Tool Changes
- RFID Guides AGV in Suspension Production
- IO-Link Wired Silencer Production
- Workpiece Carrier Identification in Rear Vent Production
- Weld Nut Sensing
- RFID Traceability
- RFID in Engine Production
- Bumper Production with Identification
- Solutions for Paint Shops
- Welding and Assembly Sensors
- Angle Sensors for Assembly Systems
- Tool Identification
- Pick-to-Light for Bumper Assembly
- RFID Identification of Injector Nozzles
- RFID in the Body Shop
- IO-Link Eases Differential Gear Production
- Ply Orientation Inspection
- Chemical
- excom I/O System Enables Safe Hydrogen Liquefaction
- Decentralized Automation in Ex Areas
- RFID Control of Tube Connections in the Ex Area
- Ethernet Signal Connection in the I&C Room
- Ethernet-based Automation of Modular Skids
- Ex Isolation in Modular Process Plants
- Detection of Pigs
- Remote Tank Level Monitoring with DX70
- Remote Signal I/O
- Easy Connection of Field Devices
- Signal Processing with System I/O in the Control Cabinet
- Signal Separation with Interface Technology in the Control Cabinet
- Identification of Hose Connections
- Efficient Monitoring of Cabinets in the Field
- Monitoring of Quarter Turn Actuators
- Planning and Assembly of System Solutions
- Success Stories
- Control Cabinet Monitor for Transmission of Condition Data
- Efficient Cooling of Industrial Furnaces
- I/O System Excom Creates Space in the I&C Rooms
- Zone 2 and 22 RFID
- Efficient Testing Control
- Intrinsically Safe Field Communication
- Process Control System Partnership
- Hazardous Area Remote I/O
- Dual Valve Position Feedback
- Flexibility with Fieldbus
- Asset Management with Remote I/O
- Correct Positioning with RFID in Carbide Production
- Compact Ex Protection
- Energy
- Capacitive Sensor Detects Point Level in Pellet Heating System
- RFID System Identifies Solar Cell Carriers
- Decentralized I/O System for Hazardous Areas at H2 Refueling Stations
- Decentralized I/O Solution in Ex Zone for H2-Fueling Station
- I/O Module Facilitates Setup and Mobile Use of Fuel Cell Test Stand
- Wind Turbine Rotor Positioning
- IP67 I/O in Coal Production
- UHF RFID Identifies Switch Gear
- Remote I/O in Biogas Plant
- Food and Beverage
- RFID Tracking Reduces Food Waste in Ice Cream Production
- Dough Height Inspection for Accurate Measurement
- Condition Monitoring Sensor Automates Climate Control
- Condition Monitoring of Control Cabinets
- Condition Monitoring in Storage Rooms
- Dough Thickness Control in Rolling Machines
- Leading Edge Detection of Plastic Container
- Identification of Food Containers
- Container Check
- Date/Lot Code Verification
- Quick Sensor Replacement in Beverage Plants
- Detection of Pipe Elbows
- Identification of Chocolate Moulds
- Barcode Reading on Depalletizer Station
- Success Stories
- Cloud-based Maintenance for Steam Generators
- RFID Support Enables Track and Trace in Food Production
- Reliable Linear Position Detection in Ex Zone 22
- Decentralized Control Modules in Coldstore
- Track and Trace in Meat Production with RFID
- Contact-free Encoder in Potato Production
- UHF RFID in Food Distribution Center
- RFID for Chocolate production
- Distributed I/O for Food Equipment
- Remote I/O for Distilleries
- RFID and Autoclaves
- Transparency in Chocolate Manufacturing
- IP67 Power Supplies for Conveyors
- Identification in Food Product Storage
- Detecting Refrigerated Breakfast Rolls on a Multi-Lane Conveyor
- Reliable Cap Orientation Verification in Aseptic Areas
- Clear and Tipped Bottle Detection on Depalletizer
- Clear Plastic Bottle Detection
- Frozen Food Packaging Label Inspection
- In-Line Bottle Accumulation on Single Filer
- Logistics
- UHF RFID Tunnel for Goods Identification on Conveyor Belts
- Preventing Package Jams in the Logistics Center
- Height Control and 3D Spatial Monitoring on Autonomous Forklift Trucks
- Decentralized Control of Conveyor Modules
- Tracking Big Bags with RFID
- Distance Detection in Container Cranes
- Access Control for Protected Areas
- Decentralized Muting of Electro-sensitive Protective Equipment
- I/O Blocks Control Roller Conveyor Modules
- Container Check
- Fast Tag Detection at Warehouse Gates
- Item-level Detection with UHF RFID
- Preventive Maintenance on Conveyor Belts
- Detection of Transport Containers
- Level Detection in Vessels
- Identification of Cryovessels
- Identification of Mobile Containers with Handheld Devices
- Identification of Food Containers
- Tier 1 – Bumper Identification
- Condition Monitoring in Storage Rooms
- Collision Protection on Reach Stackers
- Success Stories
- Efficient Solution for the Digitalization of Conveyor Technology
- Logistics: RFID Reduces Error Quota by 99 Percent
- RFID: ROI Achieved After Three Avoided Delivery Errors
- Reliable AGV Control through Sensor-based Complete Solution
- Sustainable Tracking of RTIs thanks to RFID
- RFID Solution for Error-Proof Material Logistics
- RFID with HF Bus Mode Eases Seed Storage
- Pick-by-Light accelerates manual logistics by over 60 percent
- Pick-by-light Solution Facilitates Assembly Processes
- RFID Enables Unmanned Store at Major Building Site
- I/O and Safety Modules Increase Throughput in Intralogistics
- Shipment Tracking for Raw Materials
- RFID-Based Tracking Solution for Loading Error Minimization
- RFID-based Tracking of Inbound and Outbound Materials
- Decentralized UHF RFID Solution
- Contact-free Encoder in Potato Production
- Decentralized Control Modules in Coldstore
- Speed Control via Radar Sensor QT50
- IP67 Power Supplies for Conveyors
- Modular Conveyor System
- RFID Solution for Warehouse
- RFID Guides AGV in Suspension Production
- RFID Identifies Pharmaceuticals
- UHF RFID in Food Distribution Center
- Autonomous Parking Assistance for Trucks
- Mobile Equipment
- Animal and Object Detection on the Combine Harvester
- Condition Monitoring Sensor Automates Climate Control
- Loading Dock Occupancy Monitoring
- Monitoring Railcars Wheels Wirelessly
- Automatic Slope Compensation
- Distribution Lines for Field Sprayers
- Reach Stacker Status With Bright Lighting Indicators
- Angle Measurement on a Field Sprayer
- Material Flow Monitoring on a Combine Harvester
- Determining the Boom Angle Position
- Vehicle at Loading Dock
- Wireless Forklift Signaling
- Equipment Compartment Illumination on Fire Engines
- Two-Axis Tilt Measurement on a Combine Harvester
- STS Collision Avoidance
- Collision Protection on Reach Stackers
- Success Stories
- RFID Solution with Smart Forklifts in Autombile Production
- Safe Remote Maintenance of Irrigation and Drainage Pumps
- Access Control with RFID System
- Selective Asparagus Harvester
- Position Measurement with RFID and Encoder
- Speed Control via Radar Sensor QT50
- RFID Guides AGV in Suspension Production
- Block I/O Modules on Super Yacht
- Wear-free Encoder on Hopper Dredger
- I/O for Dust Suppression
- Cabinet Cooling
- Quick Disconnect Connectivity
- Automation Solutions for Extreme Cold
- Remote I/O for Cranes
- Rugged Heavy Metal Lifting
- Rollercoaster Positioning
- Mobile Machinery Solutions
- Exact Height Positioning
- Critical Angle Sensing
- Predictive Maintenance of Machine Parts at Port-Based Coal Conveying Facility
- Angle Sensor Detects Platform Lift
- Oil and Gas
- Packaging
- Decentralized RFID Package Verification
- Identification of Printing Color Cartridges
- Reliable Operation of Machines
- Monitoring of Caps in Filling Lines
- Monitoring Changeover Processes
- Identification of Test Bottles
- Box Insert Detection
- Level Monitoring of Ground Coffee
- Level Detection in Vessels
- Carton Dimensioning
- Detection of Transport Containers
- Success Stories
- Clear Container Detection
- Correct Label Verification
- Detecting Different Size Packages on a Conveyor
- High-Speed 2D Barcode Inspection
- Multicolored Reflective Package Detection
- Plastic Roll Diameter Measurement
- Tube Positioning Using a Registration Mark
- Vertical Form Fill Seal Machine Solutions
- Pharma
- End-to-End Sample Tracking with RFID
- RFID Control of Tube Connections in the Ex Area
- Decentralized Package Verification
- Automate Modular Skids
- High-Speed Tablet Counting With Fiber Amplifier
- Pharmaceutical Skids with Decentralized I/O Technology
- Ex Isolation in Modular Process Plants
- Control of Valve Interfaces
- I.V. Bag Liquid Detection
- Monitoring of Quarter Turn Actuators
- Detection of Pipe Elbows
- Remote Signal I/O
- Liquid Level Monitoring In A Large Tank
- Planning and Construction of Super Skids
- Easy Connection of Field Devices
- Identification of Cryovessels
- Identification of Mobile Containers
- Identification of Mobile Containers with Handheld Devices
- Securing Hose Connections for Preliminary Products
- Identification of Hose Connections in Sterile Areas
- Identification of Hose Connections in Ex Zone 1
- Identification of Big Bags and Bioreactors
- Identification of Single-Use Applications
- Semiconductor
- Electronic Marking Verification
- Counting Integrated Circuits
- Inspection of Two Barcodes
- Compact Safety Control
- Safeguarding Small Access Points
- Semiconductor Process Tool Illumination
- Adhesive Detection on PCB Assembly
- Wafer Center Detection with DF-G2
- Great Detail Inspection for Mobile Electronic Devices
- Error Proofing for IC Chips loaded into Pocket Tape
- Presence and Orientation of IC Chips Seated in Nests
- Detection of Hard Disks
- Multiproduct Light-Guided Assembly Station
- Indication of FOUP Progress
- Safeguarding Small Access Points
- Success Stories